第一代結(jié)合3D打印技術(shù)自制挖機續(xù)之定妝照
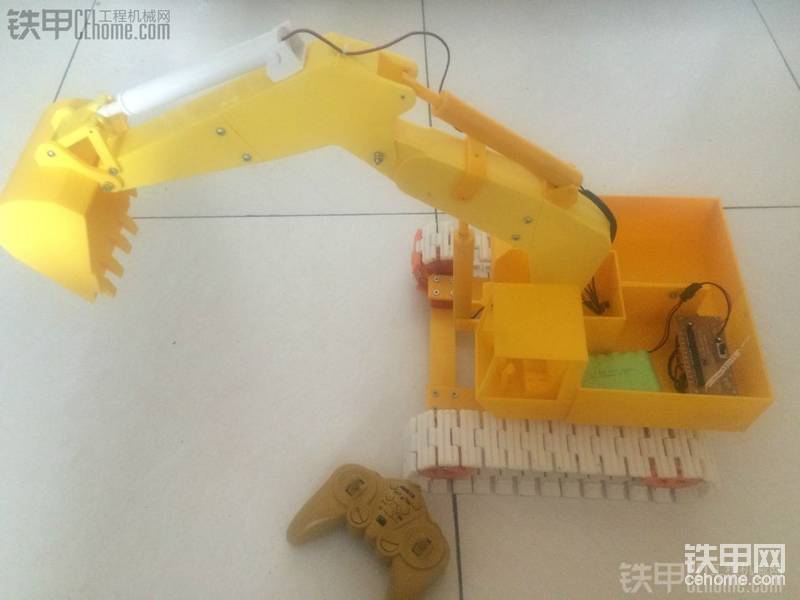
先來一張定妝照
配備了一款2.4GHz的15通道控制器�,確實如甲友說的��,這個控制器操作布局不是很好��。后期我會自己設(shè)計仿真的“十”字挖機操作桿和行走操作桿����,鑒于第一代先滿足基本功能即可。后期需要調(diào)整的模型設(shè)計還很多����,最大的問題就是減重。
電路控制單元��,可以實現(xiàn)真實挖機的所有動作��。
控制挖斗的電動仿真液壓桿�����,請大家原諒顏色不統(tǒng)一。
控制小臂的電動仿真液壓桿
控制大臂的電動仿真液壓桿��,最早的時候設(shè)計的是雙電動仿真液壓桿推動大臂��,可是調(diào)試的時候發(fā)現(xiàn)會出現(xiàn)雙推桿動作不協(xié)調(diào)的問題���,然后就修改了設(shè)計��,具體原因還在細查?��,F(xiàn)在一個推動桿雖然有點吃力但是還夠用�����。
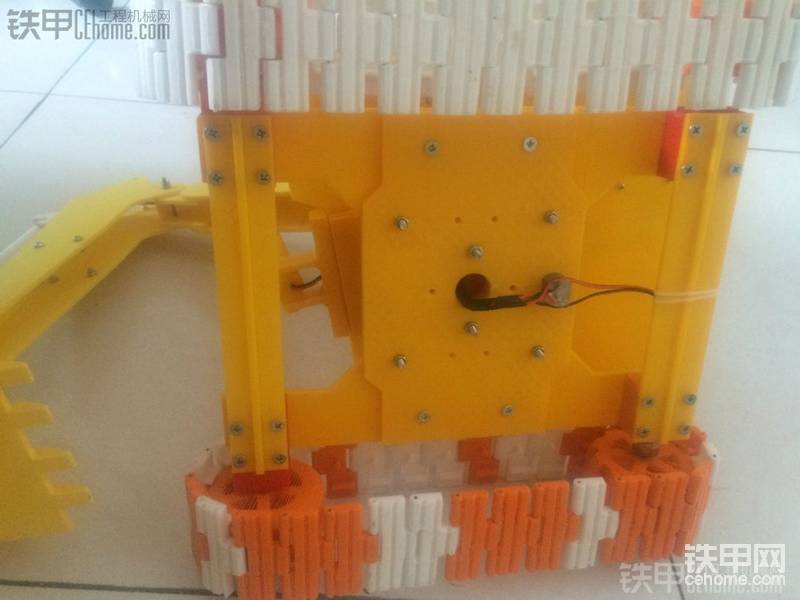
挖機旋轉(zhuǎn)機構(gòu)設(shè)計
挖機地盤設(shè)計及加固
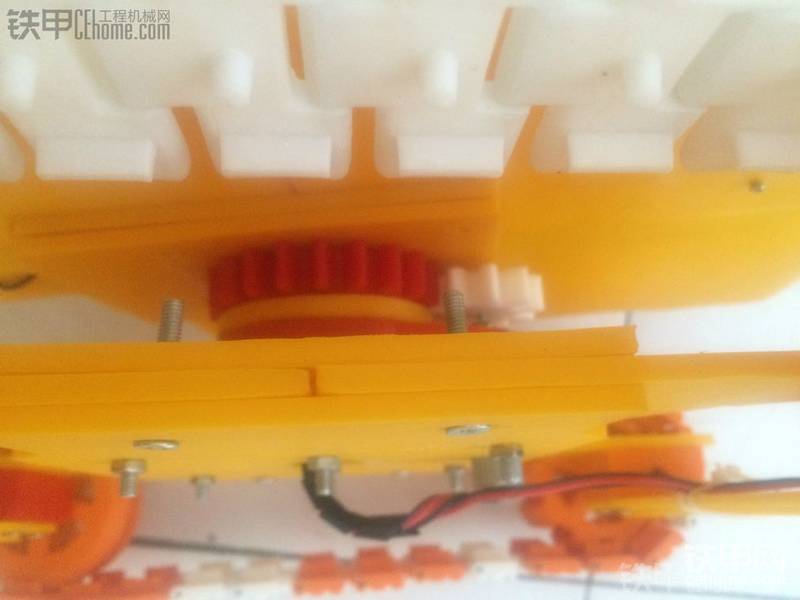
挖機行走設(shè)計����,不過沒有加負重輪,現(xiàn)在行走有力速度也不算慢
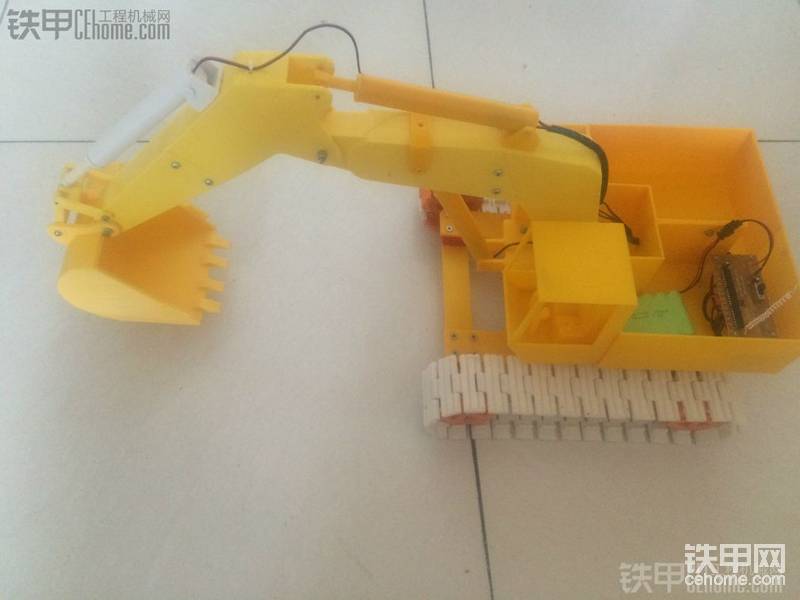
挖機擺幾個poss
擺在書柜上與其他小伙伴的合影照